

2023-07-12
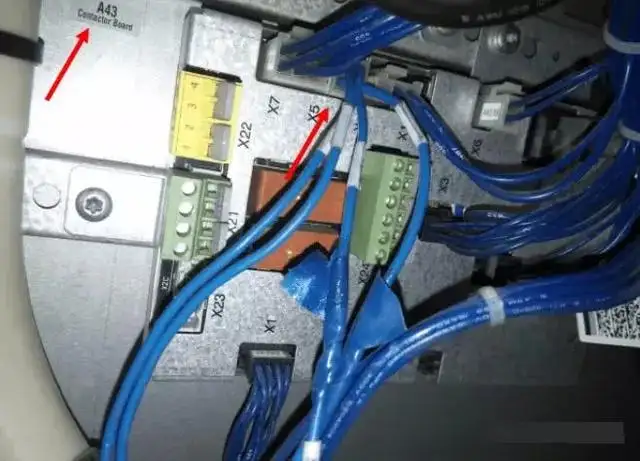
2. การจัดการข้อผิดพลาดลัดวงจรของแผงวงจรไฟฟ้าโมดูลไฟฟ้าลัดวงจรของหุ่นยนต์ ABB
ปัจจัยจากมนุษย์: ฮาร์ดแวร์แบบ Hot Swap นั้นอันตรายมาก และความล้มเหลวของแผงวงจรจำนวนมากก็เกิดจากการ Hot Swapการใช้แรงที่ไม่เหมาะสมเมื่อใส่การ์ดและปลั๊กไฟอาจทำให้อินเทอร์เฟซ ชิป ฯลฯ เสียหาย ส่งผลให้แผงวงจรของหุ่นยนต์เสียหายเมื่อเวลาในการใช้งานหุ่นยนต์เพิ่มขึ้น ส่วนประกอบบนแผงวงจรของหุ่นยนต์ก็จะเก่าลงตามธรรมชาติ ซึ่งนำไปสู่ความล้มเหลวของแผงวงจรของหุ่นยนต์
ปัจจัยด้านสิ่งแวดล้อม: เนื่องจากการบำรุงรักษาที่ไม่เหมาะสมโดยผู้ปฏิบัติงาน แผงวงจรของหุ่นยนต์จึงถูกปกคลุมด้วยฝุ่น ซึ่งอาจทำให้สัญญาณลัดวงจรได้
3. เมื่อจำเป็นต้องสำรองข้อมูลหุ่นยนต์อุตสาหกรรม
หลังจากเปิดเครื่องใหม่ครั้งแรก
ก่อนทำการแก้ไขใดๆ
3. หลังจากแก้ไขเสร็จแล้ว
4. ถ้าหุ่นยนต์อุตสาหกรรมมีความสำคัญ ควรทำเป็นประจำสัปดาห์ละ 1 ครั้ง
5. ควรทำการสำรองข้อมูลในไดรฟ์ USB ด้วย
6. ลบข้อมูลสำรองเก่าเป็นประจำเพื่อเพิ่มพื้นที่ว่างในฮาร์ดไดรฟ์
4. วิธีจัดการกับสถานการณ์ที่หุ่นยนต์เปิดอยู่และปุ่มการสอนแสดงอินเทอร์เฟซต่อไปนี้
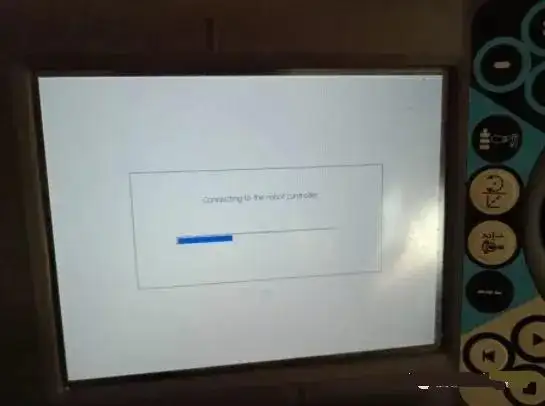 สถานการณ์ข้างต้นคือไม่มีการสร้างการเชื่อมต่อการสื่อสารระหว่างจี้การสอนและตัวควบคุมหลักของหุ่นยนต์ และสาเหตุที่ไม่ได้สร้างการเชื่อมต่อ ได้แก่:
สถานการณ์ข้างต้นคือไม่มีการสร้างการเชื่อมต่อการสื่อสารระหว่างจี้การสอนและตัวควบคุมหลักของหุ่นยนต์ และสาเหตุที่ไม่ได้สร้างการเชื่อมต่อ ได้แก่:
1. โฮสต์ของหุ่นยนต์ทำงานผิดพลาด
2. การ์ด CF ในตัว (การ์ด SD) ของโฮสต์หุ่นยนต์มีข้อบกพร่อง
3. สายเคเบิลเครือข่ายระหว่างจี้การสอนและโฮสต์หลวม ฯลฯ
วิธีการประมวลผล: 1. ตรวจสอบว่าโฮสต์ปกติหรือไม่ และการ์ด SD ในโฮสต์นั้นปกติหรือไม่
2. ตรวจสอบว่าสายเคเบิลเครือข่ายจากชุดการสอนไปยังโฮสต์เชื่อมต่อถูกต้องหรือไม่
5. การแจ้งเตือนเวลาการบำรุงรักษา 10106 หมายความว่าอย่างไรเมื่อหุ่นยนต์แสดงข้อความเตือน
สถานการณ์นี้เป็นการแจ้งเตือนการบำรุงรักษาตามระยะอัจฉริยะของหุ่นยนต์ ABB
6. วิธีจัดการกับการทำงานผิดพลาดของระบบเมื่อหุ่นยนต์เข้าสู่สถานะเปิดเครื่อง?
1. รีสตาร์ทหุ่นยนต์หนึ่งครั้ง
ถ้าไม่ตรวจสอบจี้การสอนสำหรับรายละเอียดเพิ่มเติมและดำเนินการ
3. รีสตาร์ท
4. หากยังไม่สามารถออกได้ ให้ลอง B เริ่มต้น
5. หากยังไม่ได้ผล โปรดลอง P เริ่มต้น
6. หากยังใช้งานไม่ได้ โปรดลอง I start (การดำเนินการนี้จะทำให้หุ่นยนต์กลับเป็นการตั้งค่าจากโรงงาน โปรดใช้ความระมัดระวัง)
7. หุ่นยนต์หลายตัวสามารถใช้การสำรองข้อมูลร่วมกันได้หรือไม่?
ไม่ได้ ตัวอย่างเช่น การสำรองข้อมูลของโรบ็อต A สามารถใช้ได้เฉพาะกับโรบ็อต A ไม่ใช่สำหรับโรบ็อต B หรือ C เนื่องจากอาจทำให้ระบบล้มเหลวได้
8. ไฟล์ใดบ้างที่สามารถแชร์ในการสำรองข้อมูลของโรบ็อต
หากหุ่นยนต์สองตัวมีรุ่นและโครงแบบเดียวกันคุณสามารถแชร์โปรแกรม RAPID และไฟล์ EIO ได้ แต่หลังจากแชร์แล้ว จะต้องได้รับการตรวจสอบก่อนจึงจะใช้งานได้ตามปกติ
9. ต้นกำเนิดทางกลของหุ่นยนต์คืออะไร?ต้นกำเนิดกลอยู่ที่ไหน?
เซอร์โวมอเตอร์ทั้งหกตัวของหุ่นยนต์แต่ละตัวมีจุดกำเนิดเชิงกลคงที่เฉพาะตัวการตั้งค่าจุดกำเนิดเชิงกลของหุ่นยนต์ไม่ถูกต้องจะทำให้เกิดปัญหา เช่น การเคลื่อนที่ของหุ่นยนต์มีจำกัดหรือไม่ถูกต้อง ไม่สามารถเดินเป็นเส้นตรงได้ และเกิดความเสียหายอย่างร้ายแรงกับหุ่นยนต์
10. จะล้างการแจ้งเตือนการตรวจสอบการทำงานของหุ่นยนต์ 50204 ได้อย่างไร?
1. แก้ไขพารามิเตอร์การตรวจสอบการทำงานของหุ่นยนต์ (ในเมนูการตรวจสอบการทำงานของแผงควบคุม) เพื่อให้ตรงกับสถานการณ์จริง
2. ใช้คำสั่ง AccSet เพื่อลดความเร่งของหุ่นยนต์
3. ลด v ในข้อมูลความเร็ว _ ตัวเลือกการเน่า
11. จะจัดการสัญญาณเตือน "50296, SMB memory data different" เมื่อหุ่นยนต์เปิดเครื่องเป็นครั้งแรกได้อย่างไร?
1. เลือก Calibration จากเมนูหลักของ ABB
2. คลิกที่ ROB_ 1. เข้าสู่หน้าจอการสอบเทียบและเลือกหน่วยความจำ SMB
3. เลือก "ขั้นสูง" ป้อนและคลิก "ล้างหน่วยความจำตู้ควบคุม"
4. หลังจากเสร็จสิ้น คลิก "ปิด" จากนั้นคลิก "อัปเดต"
5. เลือก 'สลับตู้ควบคุมหรือแขนหุ่นยนต์ อัปเดตตู้ควบคุมด้วยข้อมูลหน่วยความจำ SMB'
12. จะปรับแต่งความเร็วของการเคลื่อนที่ของวิถีหุ่นยนต์ในโปรแกรม RAPID ได้อย่างไร?
1. เลือกข้อมูลโปรแกรมจากเมนูหลักของจี้การสอน
2. หลังจากค้นหาประเภทข้อมูล Speeddata แล้ว ให้คลิก ใหม่
3. คลิกที่ค่าเริ่มต้น และความหมายของตัวแปรทั้งสี่ Speeddata คือ: v_ TCP แทนความเร็วในการวิ่งเชิงเส้นของหุ่นยนต์ v_ Rot แทนความเร็วในการหมุนของหุ่นยนต์ v_ Leax แทนความเร็วในการทำงานเชิงเส้นของแกนภายนอก , v_ Reax หมายถึงความเร็วในการหมุนของแกนภายนอกหากไม่มีแกนภายนอก ไม่จำเป็นต้องแก้ไขสองแกนสุดท้าย
4. ข้อมูลที่กำหนดเองสามารถเรียกใช้ในโปรแกรม RAPID
13. การแก้ไขปัญหาข้อผิดพลาดทั่วไป 6 ประการในการซ่อมเซอร์โวมอเตอร์ของหุ่นยนต์ ABB
1. วิธีจัดการกับข้อผิดพลาดการโอเวอร์โฟลว์ของตัวนับข้อผิดพลาดของมอเตอร์ในระหว่างการหมุนด้วยความเร็วสูง
ข้อผิดพลาดของมอเตอร์ล้นข้อผิดพลาดเกิดขึ้นระหว่างการหมุนด้วยความเร็วสูง
มาตรการรับมือ 1: ตรวจสอบว่าการเดินสายของสายไฟของมอเตอร์และสายเอ็นโค้ดเดอร์ถูกต้องหรือไม่ และสายเคเบิลเสียหายหรือไม่
ข้อผิดพลาดโอเวอร์โฟลว์ของตัวนับข้อผิดพลาดของมอเตอร์เกิดขึ้นเมื่อป้อนพัลส์คำสั่งแบบยาว
ข้อผิดพลาดของมอเตอร์ล้นเกิดขึ้นระหว่างการทำงาน
มาตรการรับมือ 2: เพิ่มค่าการตั้งค่าระดับน้ำล้นของตัวนับข้อผิดพลาดชะลอความเร็วในการหมุนขยายเวลาการเร่งความเร็วและการลดความเร็วโหลดหนักเกินไป และจำเป็นต้องเลือกมอเตอร์ที่มีความจุมากขึ้นตั้งแต่เริ่มต้นหรือลดภาระ และติดตั้งอุปกรณ์ส่งกำลังเช่นตัวลดขนาดเพื่อเพิ่มภาระ
2. จะทำอย่างไรหากไม่ทำงานเมื่อมีเอาต์พุตพัลส์?
ตรวจสอบค่าปัจจุบันของเอาต์พุตพัลส์ของคอนโทรลเลอร์และดูว่าไฟเอาต์พุตพัลส์กะพริบหรือไม่ รับทราบว่าพัลส์คำสั่งได้รับการปฏิบัติตามและขณะนี้กำลังส่งออกตามปกติ
ตรวจสอบว่าสายควบคุม สายไฟ และสายเข้ารหัสจากตัวควบคุมไปยังไดรเวอร์ต่อสายไม่ถูกต้อง เสียหาย หรือสัมผัสไม่ดี
ตรวจสอบว่าเบรกของเซอร์โวมอเตอร์พร้อมเบรกเปิดอยู่หรือไม่
ตรวจสอบว่าแผงควบคุมของไดรเวอร์เซอร์โวรับทราบอินพุตของคำสั่งพัลส์หรือไม่
คำสั่งการทำงาน Run เป็นเรื่องปกติ
รูปแบบการควบคุมจะต้องเลือกรูปแบบการควบคุมทิศทาง
ประเภทพัลส์อินพุตที่กำหนดโดยไดรเวอร์เซอร์โวสอดคล้องกับการตั้งค่าพัลส์คำสั่งหรือไม่
ตรวจสอบให้แน่ใจว่าไดรฟ์ด้านการหมุนด้านบวกหยุดทำงาน สัญญาณหยุดไดรฟ์ด้านการหมุน และไม่ได้ป้อนสัญญาณรีเซ็ตตัวนับข้อผิดพลาด โหลดถูกตัดการเชื่อมต่อ และการทำงานที่ไม่มีโหลดเป็นปกติตรวจสอบระบบกลไก
3. ฉันควรทำอย่างไรหากไม่มีรายงานโอเวอร์โหลดพร้อมโหลด
หากเกิดขึ้นเมื่อเชื่อมต่อสัญญาณ Servo Run และไม่มีการปล่อยพัลส์:
ตรวจสอบการเดินสายไฟของเซอร์โวมอเตอร์เพื่อดูว่ามีการสัมผัสที่ไม่ดีหรือสายเคเบิลเสียหายหรือไม่หากเป็นเซอร์โวมอเตอร์ที่มีเบรก จะต้องเปิดเบรกอัตราขยายของลูปความเร็วสูงเกินไปหรือไม่ค่าคงที่เวลารวมของลูปความเร็วที่ตั้งไว้น้อยเกินไปหรือไม่
หากเซอร์โวทำงานผิดปกติระหว่างการทำงานเท่านั้น:
อัตราขยายของวงจรแอซิมัทสูงเกินไปหรือไม่แอมพลิจูดของการกำหนดตำแหน่งเสร็จสมบูรณ์น้อยเกินไปหรือไม่ตรวจสอบว่าไม่มีโรเตอร์ล็อคบนเพลาเซอร์โวมอเตอร์หรือไม่ และปรับเครื่องจักรตั้งแต่เริ่มต้น
4. จะจัดการกับเสียงหรือการสั่นสะเทือนที่ผิดปกติระหว่างการทำงานได้อย่างไร?
เดินสายเซอร์โว:
ใช้สายไฟ สายเอ็นโค้ดเดอร์ สายควบคุม และสายเคเบิ้ลที่ได้มาตรฐานเพื่อตรวจสอบความเสียหายตรวจสอบว่ามีแหล่งรบกวนอยู่ใกล้สายควบคุมหรือไม่ และขนานหรือใกล้เกินไปกับสายไฟกระแสสูงที่อยู่ใกล้เคียงตรวจสอบว่ามีการเปลี่ยนแปลงใดๆ ในศักยภาพของขั้วต่อสายดินเพื่อให้แน่ใจว่ามีการต่อลงดินที่ดีเยี่ยม
เซอร์โวพารามิเตอร์:
การตั้งค่าอัตราขยายของเซอร์โวมีขนาดใหญ่เกินไป และขอแนะนำให้ปรับพารามิเตอร์เซอร์โวด้วยตนเองหรือใช้งานจริงตั้งแต่เริ่มต้นยอมรับการตั้งค่าคงที่เวลาของตัวกรองการตอบสนองความเร็ว ด้วยค่าเริ่มต้นเป็น 0 สามารถเพิ่มค่าที่ตั้งไว้ได้โดยการทดสอบการตั้งค่าอัตราทดเกียร์อิเล็กทรอนิกส์ใหญ่เกินไป แนะนำให้คืนค่าเป็นการตั้งค่าจากโรงงานการสั่นพ้องระหว่างระบบเซอร์โวกับระบบกลไก การทดสอบและการปรับความถี่และแอมพลิจูดของตัวกรองบาก
ระบบเครื่องกล:
ข้อต่อที่เชื่อมต่อเพลามอเตอร์และระบบอุปกรณ์เบี่ยงเบนและไม่ได้ขันสกรูติดตั้งให้แน่นการมีส่วนร่วมของมู่เล่ย์หรือเฟืองที่ไม่ดีอาจทำให้แรงบิดของโหลดเปลี่ยนไปทดสอบการทำงานแบบไม่โหลดหากการทำงานไม่มีโหลดเป็นปกติ ให้ตรวจดูว่ามีความผิดปกติใดๆ ในส่วนเชื่อมของระบบกลไกหรือไม่ยอมรับว่าความเฉื่อยของโหลด แรงบิด และความเร็วมากเกินไปหรือไม่ ทดสอบการทำงานที่ไม่มีภาระ และถ้าการทำงานที่ไม่มีภาระเป็นปกติ ให้ลดภาระหรือเปลี่ยนไดรเวอร์และมอเตอร์ด้วยความจุที่มากขึ้น
5. วิธีจัดการกับการควบคุมการวางแนวและการวางตำแหน่งที่ไม่ถูกต้องระหว่างการซ่อมแซมเซอร์โวมอเตอร์ของหุ่นยนต์ ABB
ประการแรก รับทราบว่าค่าพัลส์ที่ประกาศจริงของคอนโทรลเลอร์สอดคล้องกับค่าที่คาดไว้หรือไม่ ถ้าไม่ ให้ตรวจสอบและแก้ไขโปรแกรม
ตรวจสอบว่าจำนวนคำสั่งพัลส์ที่ได้รับจากไดรเวอร์เซอร์โวตรงกับที่ประกาศโดยคอนโทรลเลอร์หรือไม่หากไม่มี ให้ตรวจสอบสายควบคุมตรวจสอบว่าการตั้งค่าของรูปแบบพัลส์คำสั่งเซอร์โวสอดคล้องกับการตั้งค่าคอนโทรลเลอร์ เช่น CW/CCW หรือพัลส์+ทิศทาง
การตั้งค่าอัตราขยายของเซอร์โวมีขนาดใหญ่เกินไป โปรดปรับอัตราขยายเซอร์โวด้วยตัวเองหรือปรับตั้งแต่เริ่มต้นเซอร์โวมอเตอร์มีแนวโน้มที่จะเกิดข้อผิดพลาดสะสมระหว่างการเคลื่อนที่แบบลูกสูบขอแนะนำให้ตั้งค่าสัญญาณจุดกำเนิดเชิงกลภายใต้เงื่อนไขที่อนุญาตโดยกระบวนการ และดำเนินการค้นหาจุดกำเนิดก่อนที่ข้อผิดพลาดจะเกินขนาดที่อนุญาตตัวระบบกลไกเองมีความแม่นยำต่ำหรือองค์กรการส่งกำลังผิดปกติ (เช่น การเบี่ยงเบนของข้อต่อระหว่างเซอร์โวมอเตอร์และระบบอุปกรณ์)
6. การซ่อมแซมเซอร์โวมอเตอร์ของหุ่นยนต์ ABB, การควบคุมทิศทาง, รายงานข้อผิดพลาดเกินความเร็ววิธีจัดการกับมัน?
ทันทีที่เชื่อมต่อสัญญาณเซอร์โวรัน มันจะทริกเกอร์: ตรวจสอบว่าสายไฟของสายไฟเซอร์โวมอเตอร์และสายเอ็นโค้ดเดอร์ถูกต้องและไม่เสียหายหรือไม่
14. หุ่นยนต์อุตสาหกรรม ABB ได้รับการบำรุงรักษาตามปกติอย่างไร?
ก่อนการทำงานปกติของ "การตรวจสอบเบรก" จำเป็นต้องตรวจสอบเบรกมอเตอร์ของแต่ละแกนวิธีการตรวจสอบเบรกมอเตอร์มีดังนี้:
1. หมุนแกนของแขนกลแต่ละข้างไปยังตำแหน่งโหลดสูงสุด
2. หมุนสวิตช์เลือกโหมดมอเตอร์บนตัวควบคุมหุ่นยนต์ไปที่ตำแหน่ง MOTORS OFF
3. ตรวจสอบว่าเพลาอยู่ในตำแหน่งเดิมหรือไม่หากแขนกลยังคงรักษาตำแหน่งไว้หลังจากปิดมอเตอร์ แสดงว่าเบรกอยู่ในสภาพดี
อันตรายจากการสูญเสียฟังก์ชันการชะลอความเร็ว (250 มม./วินาที)
อย่าเปลี่ยนอัตราทดเกียร์หรือพารามิเตอร์การเคลื่อนไหวอื่น ๆ จากคอมพิวเตอร์หรือจี้การสอนซึ่งจะส่งผลต่อการทำงานของการชะลอความเร็ว (250 มม./วินาที)
15. หลายประเด็นที่ต้องใส่ใจเมื่อใช้อุปกรณ์ช่วยสอนอย่างปลอดภัย:
ปุ่มอุปกรณ์เปิดใช้งานที่ติดตั้งบนปุ่มสอน เมื่อกดลงครึ่งหนึ่ง ระบบจะเปลี่ยนเป็นโหมด MOTORS ONเมื่อปล่อยปุ่มหรือกดจนสุด ระบบจะเปลี่ยนเป็นโหมด MOTORS OFF
16. ในการใช้อุปกรณ์ช่วยสอนอย่างปลอดภัยต้องปฏิบัติตามหลักการดังต่อไปนี้:
1.เมื่อปุ่มเปิดใช้งานอุปกรณ์ไม่สามารถสูญเสียฟังก์ชันระหว่างการตั้งโปรแกรมหรือการดีบัก และหุ่นยนต์ไม่จำเป็นต้องเคลื่อนที่ ให้ปล่อยปุ่มเปิดใช้งานอุปกรณ์ทันที
2. เมื่อบุคลากรที่เขียนโปรแกรมเข้าไปในพื้นที่ปลอดภัย พวกเขาจะต้องพกจี้การสอนไว้ที่ตัวเสมอเพื่อป้องกันไม่ให้ผู้อื่นเคลื่อนย้ายหุ่นยนต์
17. เมื่อทำงานภายในช่วงการทำงานของแขนหุ่นยนต์ จะต้องปฏิบัติตามประเด็นต่อไปนี้:
1. ต้องหมุนสวิตช์เลือกโหมดบนคอนโทรลเลอร์ไปที่ตำแหน่งแมนนวลเพื่อสั่งงานอุปกรณ์ที่เปิดใช้งานเพื่อตัดการเชื่อมต่อคอมพิวเตอร์หรือสั่งงานจากระยะไกล
2. เมื่อสวิตช์เลือกโหมดเปิดอยู่
3. ให้ความสนใจกับแกนการหมุนของแขนหุ่นยนต์ ระวังเมื่อผมหรือเสื้อผ้าปะปนกันนอกจากนี้ ให้ความสนใจกับส่วนประกอบหรืออุปกรณ์อื่นๆ ที่เลือกไว้บนแขนหุ่นยนต์
4. ตรวจสอบเบรกมอเตอร์ของแต่ละแกน
18. สัมผัสส่วนเบี่ยงเบน
ปรากฏการณ์ที่ 1: ตำแหน่งที่นิ้วสัมผัสไม่ตรงกับลูกศรของเมาส์
เหตุผล: หลังจากติดตั้งโปรแกรมไดรเวอร์แล้ว จี้การสอนไม่แตะตรงกลางตำแหน่งตาวัวในแนวตั้งระหว่างการปรับเทียบ
วิธีแก้ไข: ปรับตำแหน่งใหม่
ปรากฏการณ์ที่ 2: บางพื้นที่มีการสัมผัสที่แม่นยำ ในขณะที่พื้นที่อื่นมีการสัมผัสที่คลาดเคลื่อน
สาเหตุ: ฝุ่นหรือตะกรันจำนวนมากสะสมอยู่บนแถบสะท้อนเสียงรอบ ๆ หน้าจอสัมผัสคลื่นเสียงของ Surface ซึ่งส่งผลต่อการส่งสัญญาณเสียง
วิธีแก้ไข: ทำความสะอาดหน้าจอสัมผัส โดยใส่ใจเป็นพิเศษในการทำความสะอาดแถบสะท้อนคลื่นเสียงทุกด้านของหน้าจอสัมผัสเมื่อทำความสะอาด ให้ถอดแหล่งจ่ายไฟของการ์ดควบคุมหน้าจอสัมผัสออก
19. สอนจี้สัมผัสไม่มีการตอบสนอง
ปรากฏการณ์: เมื่อสัมผัสหน้าจอ ลูกศรของเมาส์ไม่ขยับและไม่มีการเปลี่ยนแปลงตำแหน่ง
เหตุผล: มีหลายสาเหตุสำหรับปรากฏการณ์นี้ดังต่อไปนี้:
1. ฝุ่นหรือตะกรันที่สะสมบนแถบสะท้อนเสียงรอบ ๆ หน้าจอสัมผัสคลื่นเสียงของ Surface นั้นร้ายแรงมาก ทำให้หน้าจอสัมผัสไม่ทำงาน
2. หน้าจอสัมผัสทำงานผิดปกติ
3. การ์ดควบคุมหน้าจอสัมผัสทำงานผิดปกติ
4. สายสัญญาณหน้าจอสัมผัสทำงานผิดปกติ
5. พอร์ตอนุกรมของโฮสต์ทำงานผิดปกติ
6. ระบบปฏิบัติการของจี้การสอนทำงานผิดปกติ
7. ข้อผิดพลาดในการติดตั้งไดรเวอร์หน้าจอสัมผัส
วิธีแก้ไข: สังเกตไฟแสดงสถานะหน้าจอสัมผัสซึ่งจะกะพริบเป็นประจำภายใต้สถานการณ์ปกติ ประมาณวินาทีละครั้ง
เมื่อสัมผัสหน้าจอ จี้การสอนจะกลายเป็นสีดำ ซึ่งเป็นปัญหาที่ซับซ้อนหากตั้งค่าการประหยัดพลังงานแสงพื้นหลัง หน้าจอสีดำเป็นเรื่องปกติหากคำที่สองในพื้นที่ควบคุมระบบทำงานโดยไม่ได้ตั้งใจ หน้าจอจะเป็นสีดำเช่นกันหากไม่รวมสองจุดแรก ให้อัปเดตเป็นเฟิร์มแวร์ล่าสุดเพื่อตรวจสอบ
ส่งคำถามของคุณโดยตรงถึงเรา

