
สถานที่กำเนิด:
จีน
ชื่อแบรนด์:
YOUNGYOU
ได้รับการรับรอง:
CE
หมายเลขรุ่น:
PY4030U-050
ติดต่อเรา
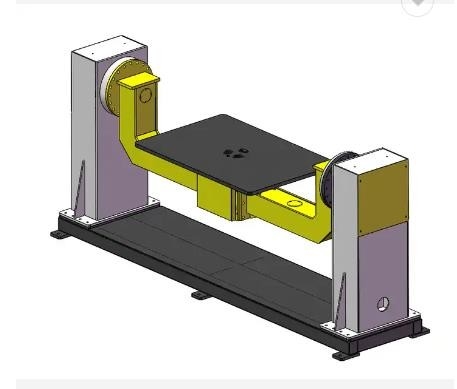




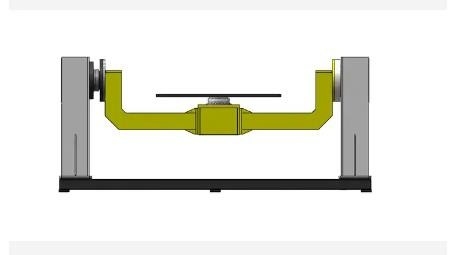
ผลิตในประเทศจีน 1200 * 1200 แผ่นเสียง 380v 50-60hz แกนโหลด 100-1000kg ตำแหน่งเชื่อม Biaxial
เทคโนโลยีการนำทางและการระบุตำแหน่งแบบสะท้อนแสงสำหรับหุ่นยนต์เคลื่อนที่
วิธีการกำหนดตำแหน่งการนำทางด้วยการสะท้อนแสงโดยทั่วไปส่วนใหญ่จะใช้เซนเซอร์เลเซอร์หรืออินฟราเรดในการวัดระยะทั้งเลเซอร์และอินฟราเรดใช้เทคโนโลยีการสะท้อนแสงสำหรับการนำทางและการวางตำแหน่ง
ระบบกำหนดตำแหน่งบนพื้นโลกด้วยเลเซอร์โดยทั่วไปประกอบด้วยกลไกการหมุนด้วยเลเซอร์ ตัวสะท้อนแสง อุปกรณ์รับออปโตอิเล็กทรอนิกส์ และอุปกรณ์รับและส่งข้อมูล
ระหว่างการทำงาน เลเซอร์จะถูกปล่อยออกมาผ่านกลไกกระจกหมุนเมื่อสแกนจุดสังเกตแบบร่วมมือที่ประกอบด้วยแผ่นสะท้อนแสงด้านหลัง แสงที่สะท้อนจะถูกประมวลผลโดยเครื่องรับโฟโตอิเล็กทริกเป็นสัญญาณตรวจจับโปรแกรมการรับข้อมูลเริ่มต้นขึ้นเพื่ออ่านรหัสดิสก์ข้อมูลของกลไกการหมุน (ค่ามุมที่วัดได้ของเป้าหมาย) จากนั้นจึงส่งไปยังคอมพิวเตอร์ส่วนบนเพื่อประมวลผลข้อมูลผ่านการสื่อสารตามตำแหน่งที่ทราบของจุดสังเกตและข้อมูลที่ตรวจพบ สามารถคำนวณตำแหน่งและทิศทางปัจจุบันของเซ็นเซอร์ในระบบพิกัดจุดสังเกตเพื่อให้สามารถนำทางและกำหนดตำแหน่งเพิ่มเติมได้
เลเซอร์เรนดิงมีข้อได้เปรียบของลำแสงแคบ ความขนานที่ดี การกระเจิงขนาดเล็ก และความละเอียดสูงในทิศทางที่หลากหลาย แต่ก็ได้รับผลกระทบอย่างมากจากปัจจัยด้านสิ่งแวดล้อมเช่นกันดังนั้น วิธีการตัดทอนสัญญาณที่รวบรวมได้เมื่อใช้ช่วงเลเซอร์จึงเป็นความท้าทายที่สำคัญเช่นกันนอกจากนี้ ระยะเลเซอร์ยังมีจุดบอด ทำให้ยากต่อการนำทางและกำหนดตำแหน่งด้วยเลเซอร์เพียงอย่างเดียวในการใช้งานทางอุตสาหกรรม โดยทั่วไปยังคงใช้กันอย่างแพร่หลายในการทดสอบในสถานที่อุตสาหกรรมภายในขอบเขตที่กำหนด เช่น การตรวจจับรอยร้าวของท่อส่ง
เทคโนโลยีการตรวจจับอินฟราเรดมักใช้ในระบบหลีกเลี่ยงสิ่งกีดขวางของหุ่นยนต์หลายข้อต่อเพื่อสร้างพื้นที่ขนาดใหญ่ของหุ่นยนต์ "ผิวหนังที่บอบบาง" ซึ่งครอบคลุมพื้นผิวของแขนหุ่นยนต์และสามารถตรวจจับวัตถุต่างๆ ที่แขนหุ่นยนต์พบระหว่างการทำงาน
เซ็นเซอร์อินฟราเรดทั่วไปประกอบด้วยไดโอดเปล่งแสงโซลิดสเตตที่สามารถเปล่งแสงอินฟราเรดและไดโอดไวแสงโซลิดสเตตที่ทำหน้าที่เป็นตัวรับสัญญาณมอดูเลตถูกปล่อยออกมาโดยหลอดเปล่งแสงอินฟราเรด และหลอดไวแสงอินฟราเรดจะรับสัญญาณมอดูเลตอินฟราเรดที่สะท้อนโดยเป้าหมายการกำจัดการรบกวนอินฟราเรดในสิ่งแวดล้อมทำได้โดยการมอดูเลตสัญญาณและตัวกรองอินฟราเรดโดยเฉพาะหากสัญญาณเอาท์พุต Vo แทนเอาต์พุตแรงดันไฟฟ้าของความเข้มแสงที่สะท้อน ดังนั้น Vo จะเป็นฟังก์ชันของระยะห่างระหว่างหัววัดและชิ้นงาน: Vo=f (x, p) โดยที่ p คือค่าสัมประสิทธิ์การสะท้อนของชิ้นงานP เกี่ยวข้องกับสีผิวและความหยาบของวัตถุเป้าหมายX - ระยะห่างระหว่างโพรบและชิ้นงาน
เมื่อชิ้นงานเป็นชิ้นงานประเภทเดียวกันที่มีค่า p เท่ากัน x และ Vo จะสอดคล้องกันแบบหนึ่งต่อหนึ่งสามารถหาค่า X ได้โดยการสอดแทรกข้อมูลการทดลองของการวัดระยะใกล้ของวัตถุเป้าหมายต่างๆด้วยวิธีนี้ ระยะห่างระหว่างหุ่นยนต์กับวัตถุเป้าหมายสามารถวัดได้โดยใช้เซ็นเซอร์อินฟราเรด และยังสามารถใช้วิธีการประมวลผลข้อมูลอื่นๆ เพื่อนำทางและระบุตำแหน่งหุ่นยนต์เคลื่อนที่ได้
แม้ว่าการระบุตำแหน่งการตรวจจับด้วยอินฟราเรดยังมีข้อได้เปรียบ เช่น ความไวสูง โครงสร้างที่เรียบง่าย และต้นทุนต่ำ เนื่องจากความละเอียดของมุมสูงและความละเอียดของระยะทางต่ำ จึงมักใช้เป็นเซนเซอร์จับความใกล้เคียงในหุ่นยนต์เคลื่อนที่เพื่อตรวจจับสิ่งกีดขวางที่ใกล้เข้ามาหรือการเคลื่อนไหวอย่างกะทันหัน ซึ่งช่วยอำนวยความสะดวกในกรณีฉุกเฉิน การหยุดทำงานของหุ่นยนต์
![]()
เกี่ยวกับบริษัท
รางนำทางของเราได้ร่วมมือกับแบรนด์หุ่นยนต์ที่มีชื่อเสียงระดับนานาชาติมากมาย เช่นABB KUKA FANUC Yaskawa UR.บริษัทที่เกี่ยวข้องส่วนใหญ่ ได้แก่ การวางพาเลท การขนถ่ายโหลดของรางนำทางมีตั้งแต่500กก.ถึง5000กก.ความยาวของรางนำทางได้รับการปรับแต่งตามความต้องการของลูกค้าเราได้ทำกรณีที่หุ่นยนต์ ABB IRB6700 สอดคล้องกับเครื่องจักร CNC 20 เครื่อง และรางนำทางยาว 50 เมตรทำให้การเคลื่อนที่แบบลูกสูบ การขนถ่ายของหุ่นยนต์เสร็จสมบูรณ์จำนวนหุ่นยนต์ลดลงอย่างมากและประหยัดค่าใช้จ่ายในการรวมระบบ
บริษัทของเรายังนำเสนอหุ่นยนต์อุตสาหกรรมในราคาที่น่าพอใจสำหรับการสั่งซื้อพร้อมกันในราคาที่ถูกกว่า
ยินดีต้อนรับสู่เซี่ยงไฮ้ ประเทศจีน เพื่อตรวจสอบหุ่นยนต์และรางของเรา!
การจัดหาผลิตภัณฑ์ของ บริษัท
หุ่นยนต์เอบีบี
หุ่นยนต์ KUKA
หุ่นยนต์ยาสกาว่า
หุ่นยนต์ Fanuc
หุ่นยนต์ UR
โคบอท
รางนำทาง
โคบอทผลิตในจีน
ข้อมูลจำเพาะของผลิตภัณฑ์
ตารางพารามิเตอร์ผลิตภัณฑ์

บรรจุภัณฑ์และการขนส่ง
![]()
![]()
ส่งคำถามของคุณโดยตรงถึงเรา





